















 22 / 92
22 / 92

108
Ces Urol 2016; 20(2): 104–112
PŘEHLEDOVÝ ČLÁNEK
stehů (obrázek 2). Pět až šest 9-0 nylonových stehů
použijeme ke spojení přední svalové vrstvy chá-
movodu (obrázek 3). Penrose drén, umístěný pod
prováděnou anastomózou, opatrně odstraníme.
Chámovod vložíme zpět do skrota. Stejným postu-
pem provedeme výkon na kontralaterální straně.
Tuniku varlete uzavřeme pomocí 3-0 chromo-
vých stehů a kůži skrota 5-0 vicrylovými stehy. Na
ránu aplikujeme Framykoinovou mast a překryje-
me ji kompresivním obvazem. Ránu 24 hodin po
operaci chladíme (8).
Chirurgická technika roboticky
asistované vazoepididymostomie
Roboticky asistovanou vazoepididymostomii pro-
vádíme, neobsahuje-li tekutina z proximálního kon-
ce chámovodu žádné spermie a výtok je kalný
a mazlavý. Skrotální řez rozšíříme o 1–2 centimetry
kaudálně. Protětím obalů varlete odhalíme nadvar-
le. Adventicii nadvarlete nařízneme nad místem
překážky (modrošedá zóna s dilatovanými tubuly
nadvarlete). Pro přiblížení adventicie chámovodu
k obalu nadvarlete použijeme 3-0 prolénový steh
a vytvoříme tak anastomózu s volným tahem (ob-
rázek 4). Robotickou platformu umístíme nad ope-
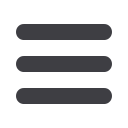
Obr. 3.
Přiblížení přední svalové vrstvy obou konců
chámovodu pomocí čtyři dvojitých 9-0 nylonových
stehů
Fig. 3.
The approximation of the anterior muscle
layers for both ends of vas deferens is approximated
with four double armed 9-0 nylon sutures
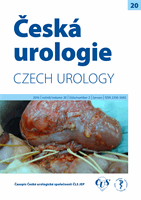
Obr. 2.
Přiblížení přední slizniční vrstvy obou konců
chámovodu pomocí tří dvojitých 10-0 nylonových
stehů
Fig. 2.
The approximation of the anterior mucosal
layers for both ends of vas deferens with tree double
armed 10-0 nylon sutures
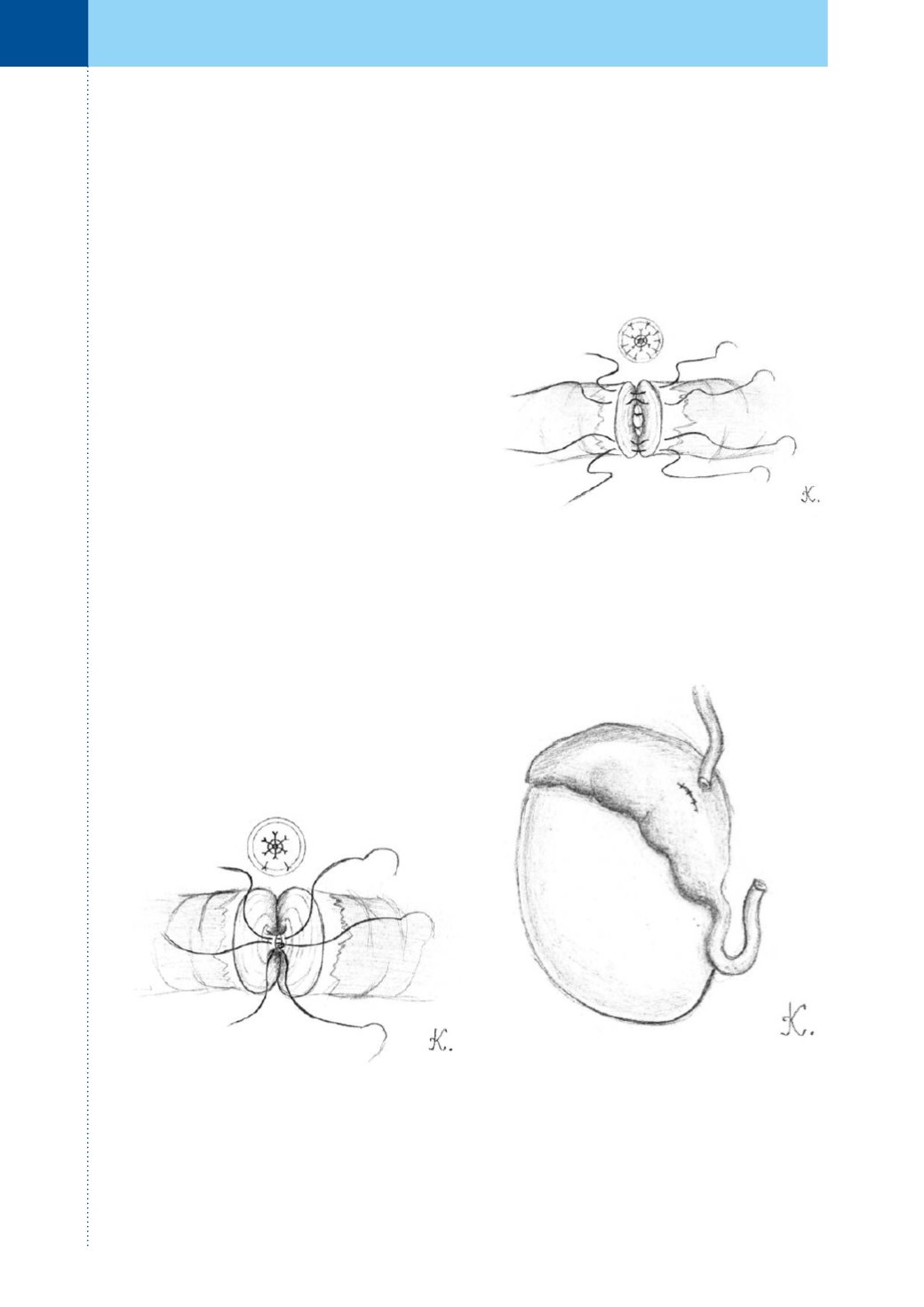
Obr. 4.
Přiblížení adventicie chámovodu k obalu
nadvarlete pomocí 3-0 prolénových stehů k vytvoření
volného tahu budoucí anastomózy
Fig. 4.
The approximation of the adventitia of vas
deferens and the single epididymal tubule with 3-0
prolene sutures to create a tension free anastomosis
rační pole. Mikrokleště umístíme na první i druhé
pracovní rameno robota. Robotické rameno pro
kameru osadíme přímou optikou. Na třetí robotické
rameno umístíme mikrokleště, které drží oční mi-
kroskalpel. Uvedené rameno může být obsazeno
i mikronůžkami místo předchozí kombinace (ta-